
L'industrie pharmaceutique est une industrie critique en matière de qualité car elle est étroitement liée à la vie et à la santé des personnes. Un système d'inspection par vision est souvent appliqué sur la ligne de production. Les objets typiquement inspectés comprennent généralement la capsule, l'injection, le bouchon à bulles, l'étiquette de l'emballage, etc. Toutes les caméras Daheng Imaging subissent des tests critiques approfondis pour garantir qu'elles peuvent répondre aux exigences industrielles et professionnelles dans des conditions difficiles. La production pharmaceutique n'a généralement pas lieu dans un laboratoire confortable, mais des résultats d'inspection fiables dans un environnement difficile sont une garantie de la qualité du médicament. Pour obtenir des résultats d'inspection fiables, les caméras Daheng Imaging offrent des images de qualité exceptionnelle avec des interfaces numériques haute performance, ainsi qu'une réponse de déclenchement rapide qui peut garantir une capture très précise. De plus, la fonction de filtre de signal de déclenchement garantit que seuls les bons signaux sont entrés dans la caméra. Aucune image incorrecte et aucune image manquante ne sont les clés les plus importantes pour le système de vision dans l'industrie pharmaceutique. Les caméras Daheng Imaging excellent dans ce domaine.
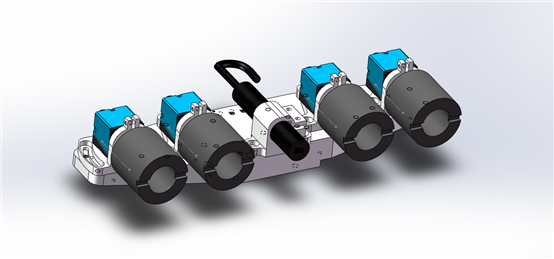
Le système de détection dynamique des défauts et des dimensions des ensembles roues des véhicules est un système d'inspection de sécurité installé sur les voies ferrées, il peut être utilisé pour détecter les paramètres géométriques des ensembles roues qui peuvent vérifier l'usure de la bande de roulement et l'usure du flanc. Par une analyse informatique, le système peut prévoir l'état de sécurité de l'ensemble roues du véhicule et faciliter le traitement des défaillances du véhicule en temps opportun. Le système est une garantie pour la sécurité d'un train, il peut être utilisé dans des enquêtes en ligne, des enquêtes d'entreposage de locomotives, des enquêtes d'entreposage de trains à grande vitesse, des enquêtes d'entreposage de métro, etc.
Toutes les caméras DAHENG IMAGING subissent des tests critiques approfondis pour garantir qu'elles peuvent répondre aux exigences industrielles et professionnelles dans des conditions difficiles. L'environnement de travail de l'ensemble roues du véhicule est généralement mis à l'épreuve, donc la fiabilité et la stabilité de la caméra sont très importantes. Dans cette application, certains lasers spectraux rouges ou certains lasers proches infrarouges sont généralement utilisés. Les lasers proches infrarouges sont plus adaptés à l'environnement extérieur que les lasers spectraux rouges, car le laser du spectre visible est facilement perturbé par la lumière du soleil, certains caméras proches infrarouges avec des lasers proches infrarouges sont nécessaires.
Le MER-131-75GM-P NIR et le MER-232-48GM-P NIR sont des caméras GigE proches infrarouges équipées de capteurs CMOS On-Semi PYTHON, les capteurs ont une réponse optimisée dans la bande proche infrarouge. Le MER-131-75GM-P NIR et le MER-232-48GM-P NIR sont alimentés via Ethernet et disposent de sorties d'E/S opto-isolées. Ils sont conçus pour passer des tests EMC critiques, ils ont la capacité de répondre à l'exigence de compatibilité électromagnétique du trafic ferroviaire.

Un scanner 3D est un dispositif qui analyse un objet ou un environnement réel pour collecter des données sur sa forme. Les données collectées seront utilisées pour construire des modèles tridimensionnels numériques. Les données 3D collectées sont utiles pour une grande variété d'applications, elles sont couramment utilisées pour la conception artistique, la conception industrielle, l'ingénierie inverse, le contrôle qualité, les prothèses et la numérisation des artefacts culturels. Elles sont également utilisées pour les achats en ligne, la production de films et les jeux vidéo.

De nombreuses technologies différentes peuvent être utilisées pour construire ces dispositifs de numérisation 3D, mais les méthodes courantes sont la vision stéréo et la triangulation laser avec feuille de lumière. Dans un système de vision stéréo, deux ou plusieurs caméras avec lumière structurée ou grille d'encodage sont utilisées, permettant de dériver des informations 3D de la surface d'objets de forme arbitraire.
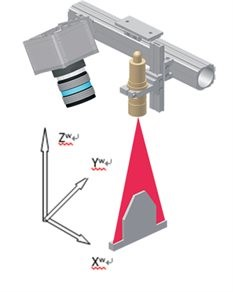
 La technique de triangulation laser avec feuille de lumière repose sur l'idée fondamentale de projeter une fine ligne lumineuse droite générée par un projecteur de ligne laser sur la surface de l'objet à reconstruire. En dérivant les coordonnées de la ligne laser dans ces images, les coordonnées mondiales Y,Z peuvent être calculées par la relation de calibration entre le plan de l'image et le plan laser. De plus, lorsque l'objet se déplace le long de l'axe des coordonnées X, la caméra peut capturer une série d'images des lignes projetées, permettant ainsi d'obtenir les coordonnées X,Y,Z de l'objet.
La technique de triangulation laser avec feuille de lumière repose sur l'idée fondamentale de projeter une fine ligne lumineuse droite générée par un projecteur de ligne laser sur la surface de l'objet à reconstruire. En dérivant les coordonnées de la ligne laser dans ces images, les coordonnées mondiales Y,Z peuvent être calculées par la relation de calibration entre le plan de l'image et le plan laser. De plus, lorsque l'objet se déplace le long de l'axe des coordonnées X, la caméra peut capturer une série d'images des lignes projetées, permettant ainsi d'obtenir les coordonnées X,Y,Z de l'objet.
Nous pouvons généralement voir toutes sortes de bouteilles en verre autour de nous, telles que des bouteilles de bière, des bouteilles de boisson, des bouteilles de parfum, etc. Ces bouteilles en verre appartiennent généralement à la catégorie des bouteilles moulées, qui sont produites en versant du liquide dans un moule pour créer une forme donnée. Il existe également un autre type de tube en verre utilisé en médecine ou en pharmacie, qui est généralement produit sans moule et nécessite une qualité plus critique.
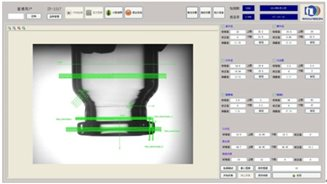
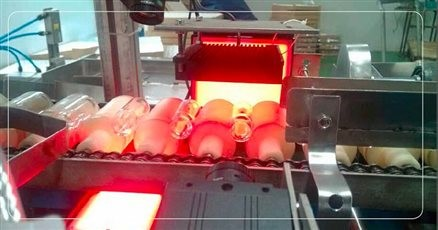
Dans les usines de fabrication de bouteilles en verre, des systèmes de vision sont généralement installés à l'extrémité chaude ou à l'extrémité froide du processus. La machine d'inspection utilise des caméras haute vitesse pour acquérir des images en temps réel d'une bouteille en verre, puis obtient des paramètres géométriques détaillés de la bouteille et vérifie les défauts. En comparant les résultats de mesure avec les paramètres dimensionnels prédéfinis, la machine d'inspection peut identifier les bouteilles défectueuses et les éjecter de la ligne de production, garantissant ainsi une qualité de bouteille élevée et une efficacité de production.
Les caméras de la famille MERCURY, telles que le MER-131-210U3M, le MER-132-43U3M, le MER-503-36U3M et le MER-131-75GM-P, présentent des caractéristiques spéciales telles qu'un taux de rafraîchissement élevé, une capture précise, une installation plug-and-play, un fonctionnement multi-caméras stable, etc. Tout cela en fait les caméras préférées des ingénieurs dans le système d'inspection des bouteilles en verre.

Dans l'industrie logistique traditionnelle, les marchandises sont généralement triées, les codes-barres sont lus et enregistrés par des opérations manuelles, puis elles sont envoyées à la zone de prélèvement. En raison des différents types de marchandises, des formes et des matériaux différents, une grande quantité de main-d'œuvre est nécessaire pour le tri. Cela prend non seulement beaucoup de temps et présente un taux d'erreur de tri élevé, mais entraîne également des coûts de main-d'œuvre élevés, ce qui ralentit considérablement la vitesse de livraison.
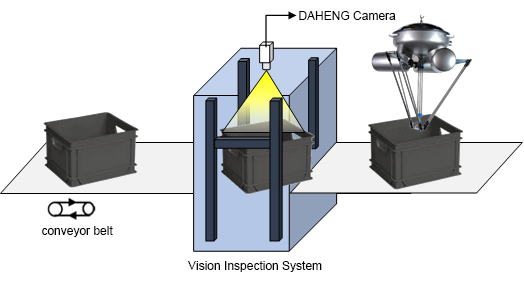
Pour trouver une solution à cette situation, DAHENG IMAGING a développé un système de tri par vision qui peut classer rapidement les objets et déterminer leur position. Ce système est composé de la caméra numérique compacte de DAHENG IMAGING, utilisant une interface USB3.0 pour transférer les données à un contrôleur PC pour analyse et traitement. Enfin, l'interface Ethernet Gigabit est utilisée pour transférer les données traitées au robot pour guider le robot dans le processus de "prélèvement". Le système de tri peut être utilisé non seulement pour le tri automatique dans l'industrie logistique, mais également pour diverses applications industrielles telles que le positionnement, l'inspection, la mesure, etc., comme indiqué dans l'image ci-dessous.
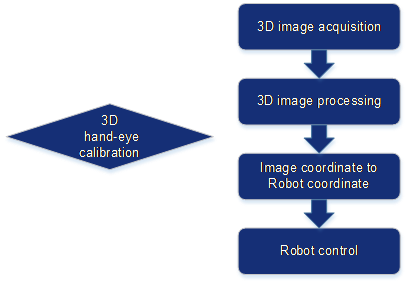
Ce système de tri par vision logistique est construit par les caméras MERCURY de DAHENG IMAGING et un robot delta. L'ensemble du système est principalement composé d'un module d'acquisition d'image 3D, d'un module de traitement d'image 3D, d'un module de transformation de coordonnées d'image en coordonnées robot, d'un module de calibration œil-main et d'un module de contrôle robotique.
Tout d'abord, le "module d'acquisition d'image 3D" capture les paniers se déplaçant à grande vitesse sur la ligne de convoyage et obtient des informations tridimensionnelles sur les marchandises dans les paniers. Ce module d'acquisition d'image est composé de deux caméras MERCURY et d'une source lumineuse laser. À la fois le champ de vision (FOV) et la plage de mesure (MR) couvrent l'ensemble du panier. La méthode de vision stéréo est utilisée pour reconstruire les informations géométriques 3D de l'objet et obtenir la position de l'objet.
Après avoir obtenu les informations géométriques 3D des objets, le "module de traitement d'image 3D" divise les caractéristiques 3D de l'objet en plusieurs morceaux séparés, analyse la position de préhension la plus adaptée des marchandises, puis transmet les données de position au "module de transformation des coordonnées d'image en coordonnées robot".
En utilisant le résultat de la calibration œil-main, le "module de transformation des coordonnées d'image en coordonnées robot" transforme la position de préhension la plus adaptée des marchandises obtenue précédemment en coordonnées robot. À travers le protocole de communication, les données de coordonnées robot seront transmises au robot et exécutées par le module de contrôle du robot. En fonction des coordonnées de préhension robot, le robot saisira précisément les marchandises appropriées.

La vision embarquée est devenue très populaire ces dernières années et convient parfaitement à certaines applications où l'accent est principalement mis sur le coût réduit, la consommation d'énergie, la taille et le poids, comme les automobiles sans pilote, les véhicules aériens sans pilote, les robots et les dispositifs médicaux, etc.
Au cours de la dernière décennie, les plates-formes informatiques personnelles basées sur les architectures Intel ont maintenu une avance substantielle en puissance de traitement, assurant leur domination continue dans la plupart des applications informatiques industrielles. Mais au cours des dernières années, les architectures des processeurs ARM ont été considérablement améliorées en ajoutant des cœurs, des instructions et des pipelines plus rapides pour augmenter leurs performances, elles ont commencé à rivaliser directement avec les processeurs PC Intel et AMD dans les applications industrielles. Le système embarqué continue de signifier un coût réduit et une faible consommation d'énergie, mais cela ne signifie plus une faible puissance de traitement.

Aujourd'hui, grâce aux progrès considérables de la capacité de calcul, de l'accumulation de données, des outils mathématiques, etc., nous pouvons voir la croissance rapide de l'intelligence artificielle (IA). Le réseau neuronal convolutif (CNN) est une méthode mathématique faisant partie du domaine de l'IA, et il se divise en deux parties : l'entraînement et l'inférence.
Une application typique du système embarqué en IA est pour l'automobile sans pilote. Dans cette application, les technologies d'IA sont utilisées pour la détection des obstacles, la reconnaissance des panneaux, des feux de signalisation, des voitures et des piétons, etc. Une batterie de caméras est disposée sur et autour de l'automobile et est responsable de fournir les images en temps réel. L'entraînement des données est généralement effectué dans le centre de données avant que l'automobile ne circule sur la route. Et l'algorithme d'inférence qui effectue les détections est intégré sur la plateforme ARM. En tant que plateforme ARM populaire, la plateforme NVIDIA Jetson TX1 ou TX2 est particulièrement appréciée dans cette application en raison de son processeur ARM+GPU, ainsi que des GPU qui sont très efficaces pour manipuler les graphiques informatiques et le traitement d'image, et la structure hautement parallèle des GPU les rend plus efficaces que les processeurs généralistes pour les algorithmes où le traitement de grands blocs de données est effectué en parallèle.

Dans une histoire à succès, la caméra MER-231-41U3C de DAHENG IMAGING est utilisée sur la plateforme NVIDIA Jetson TX2 pour la détection de conduite en temps réel. Les caractéristiques de la caméra USB3.0 telles que l'auto-gain et le temps d'exposition automatique la rendent bien adaptée à tous les types de conditions météorologiques et d'environnements extérieurs. Le SDK Linux ARM de la caméra USB3.0 est basé sur 'libusb', qui fournit un accès générique aux périphériques USB, de sorte que les données des caméras USB3.0 peuvent être librement transférées vers n'importe quelle plateforme ARMV7 ou ARMV8.
Les plateformes ARM suivantes ont été largement testées par DAHENG IMAGING :